El disseny del rover Perseverance
El rover de Mart 2020, Perseverance, es basa en la configuració del rover Curiosity del Mars Science Laboratory. Té la mida d'un cotxe, uns 3 metres de llarg (sense incloure el braç), 2,7 metres d'ample i 2,2 metres d'alt. Però amb 1.025 quilos, pesa menys que un cotxe compacte. D'alguna manera, les peces del rover són similars a les que necessitaria qualsevol ésser viu per mantenir-se "viu" i poder explorar.
Clic per engrandir. Crèdit NASA/JPL
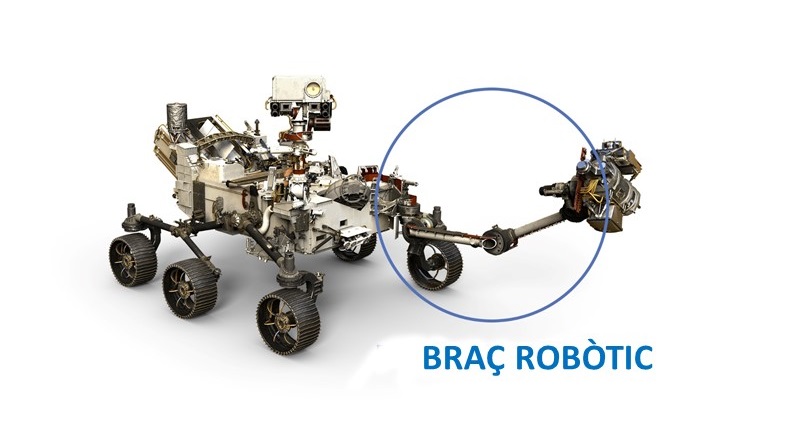
Braç Robòtic
El braç robòtic de 2 metres de llarg del Perseverance es pot moure com el nostre. Disposa de "articulacions" a l'espatlla, al colze i al canell per oferir la màxima flexibilitat. El braç permet el rover treballar com ho faria un geòleg humà: subjectant i utilitzant eines científiques amb la seva "mà" o torreta. Les pròpies "eines de mà" del rover extreuen nuclis de les roques, prenen imatges microscòpiques i analitzen la composició elemental i mineral de les roques i el sòl marcians.
Característiques:
- Longitud; 2,1 metres.
- Graus de llibertat; N'hi ha cinc. Són possibles gràcies a uns petits motors anomenats "actuadors rotatius". Els cinc graus de llibertat es coneixen com a articulació azimutal de l'espatlla, articulació d'elevació de l'espatlla, articulació de colze, articulació del canell i articulació de la torreta.
- Torreta o "mà"; A l'extrem del braç es troba la "torreta". És com una mà que porta càmeres científiques, analitzadors minerals i químics per estudiar l'habitabilitat passada de Mart, i triar la mostra de més valor científic per emmagatzemar.
- Noms de les eines de la torreta; SHERLOC i WATSON, PIXL, GDRT (Gaseous Dust Removal Tool-Eina eliminadora de pols a gas), Ground Contact Sensor (Sensor de contacte amb el terra ) i un Trepant.
- Trepant; És un trepant de percussió rotatori dissenyat per extreure mostres de nuclis de roca de la superfície de Mart.
- Broques; Un conjunt de broques intercanviables: broques d'extracció de nuclis, broca de regolita i un punxó.
- Funció principal; Ajudar en la investigació de la superfície de Mart i en la recollida de mostres.
- Diàmetre dels forats perforats; 1 polzada (27 mm)
- Trepant: El trepant del rover utilitzarà un moviment rotatori amb o sense percussió per penetrar en la superfície marciana i recollir les preuades mostres. El trepant està equipat amb tres tipus diferents d'accessoris (broques) que faciliten l'obtenció de mostres i l'anàlisi de la superfície. Les broques d'extracció de nuclis i de regolita s'utilitzen per recollir mostres marcianes directament en un tub de recollida de mostres net, mentre que la broca d'abrasió s'utilitza per raspar o "desgastar" les capes superiors de les roques, per tal de exposar les superfícies fresques i no erosionades per al seu estudi.
Recreació artística de com la torreta reculli guarda les mostres obtingudes.
Crèdit NASA/JPL
Tipus de mostres de roca que recollirà la perforadora:
Mostres de roques:
El trepant cilíndric extreu mostres de l'interior de la roca, trencant la mostra de roca al terra. Cada mostra es recull directament en un tub de recollida de mostres net. Els tubs de recollida de mostres tenen la mida aproximat d'un bolígraf. Cada nucli recollit té 0,5 polzades (13 mil·límetres) de diàmetre i 2,4 polzades (60 mm) de llarg, el que suposa una mitjana de 10-15 grams de material marcià per tub.
Mostres de regolita
S'utilitza una broca especial per recollir el material rocós solt, o regolita, de la superfície marciana. Com les mostres de roca, les mostres de regolit es recullen directament en un tub de recollida de mostres net.
Equip de mostreig a la torreta.
A l'extrem de braç hi ha la "torreta". És com una mà que porta càmeres científiques i analitzadors minerals i químics per estudiar l'habitabilitat passada de Mart i triar la mostra de més valor científic per al seu emmagatzematge. Les eines científiques muntades en la torreta són:
SHERLOC i WATSON:
SHERLOC està destinat a estudiar els minerals de prop, pel que està muntat en la torreta a on es pot col·locar al costat dels seus objectius. SHERLOC utilitza espectròmetres, un làser i una càmera per buscar elements orgànics i minerals que hagin estat alterats per ambients aquàtics i puguin tenir signes de vida microbiana en el passat.
SHERLOC té un ajudant. La càmera WATSON també està muntada a la torreta. És com la lent de mà d'un geòleg, que amplia i registra les textures dels objectius de roca i sòl que són estudiats per l'analitzador de minerals SHERLOC. La seva posició en la àgil torreta del braç robòtic permet col·locar a WATSON aprop dels objectius que estan a l'abast del braç. WATSON és també un "assistent" integral de cambra per SHERLOC i PIXL. WATSON també proporciona valuoses vistes dels sistemes del rover, com les rodes i els instruments muntats a la part baixa del rover, fora de la vista de la Mastcam-Z.
Clic per engrandir. L'instrument SHERLOC del Mars 2020: Aquí tenim un primer pla d'un
model d'enginyeria de SHERLOC acrònim de Scanning Habitatge Environments with
Raman & Luminescence de Organics & Chemicals - Escaneig d'Ambients Habitables
amb Raman i Luminescència per compostos Orgánics i Químics, un dels instruments a
bord del rover de Perseverance de la NASA. Crèdit: NASA / JPL-Caltech.
PIXL
El PIXL es munta a la torreta perquè necessita poder apropar-se als objectius minerals. És capaç de detectar senyals de vida passada. PIXL busca els canvis en les textures i les substàncies químiques de les roques i el sòl marcians que hagi deixat qualsevol vida microbiana antiga. PIXL estudiarà els espècimens candidats a una possible recollida de mostres. La informació que recopili s'utilitzarà per decidir quins són els objectius més interessants des del punt de vista científic.
Sensor de contacte amb el terra
La torreta disposa d'un sensor especial per evitar danys si el braç entra en contacte amb la superfície. El sensor de contacte ordena al braç de el rover que s'aturi si toca al terra inadvertidament.
Manipulació de mostres
El Perseverance extraurà mostres de les roques i el sòl marcians. Utilitzant el seu trepant, el rover recollirà i emmagatzemarà els nuclis en tubs en la superfície marciana.
Ho he vist aquí.